
Začiatkom mája sme sa opäť stretli v dielni, aby sme pristúpili k zásadnému kroku – finalizácii prvého prototypu. Majster kuchár priniesol na tento slávnostný akt rezne so zemiakovým šalátom. Samo priniesol krabicu plnú elektroniky a ja som priniesol nohy z EQ8 a odhodlanie dokončiť prvý kus za každú cenu.
Ako prvé nás čakalo doladenie niektorých dielov, očistenie hrán po obrábaní a čistenie všetkého čo sa malo skladať. Pripravili sme nohy z EQ8 vybraním kolíka na aretáciu azimutu. Príjemným prekvapení bolo, že základňa montáže a dosadacia plocha statívu si takmer dokonale rozumeli a dali sa spojiť centrálnou skrutkou.
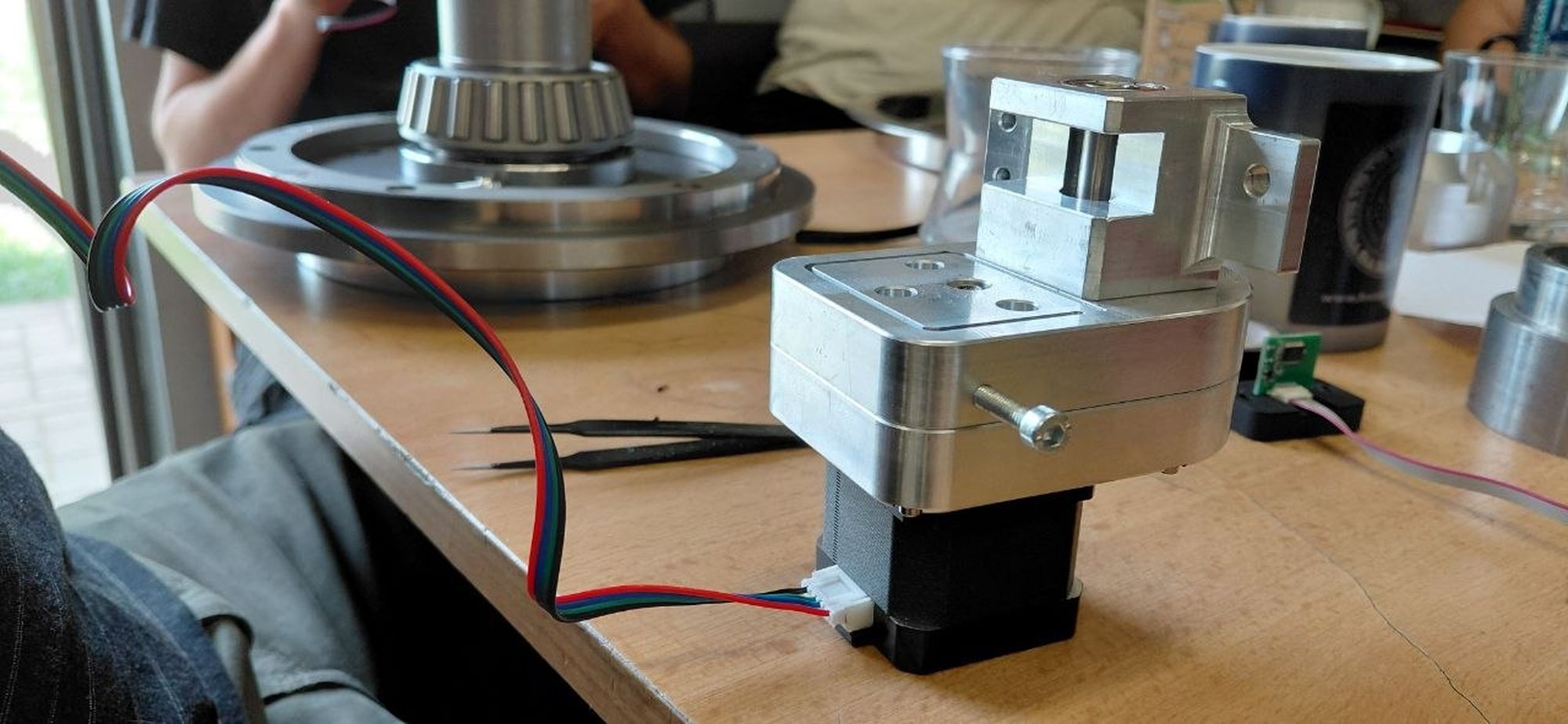
Potom konečne začali dvaja elektrotechnici (majster Jedi a jeho Padavan) merať káble a pripravovať koncovky kabeláže pre motory a enkodéry. My ostatní sme sa venovali dobrotám od pani domácej.
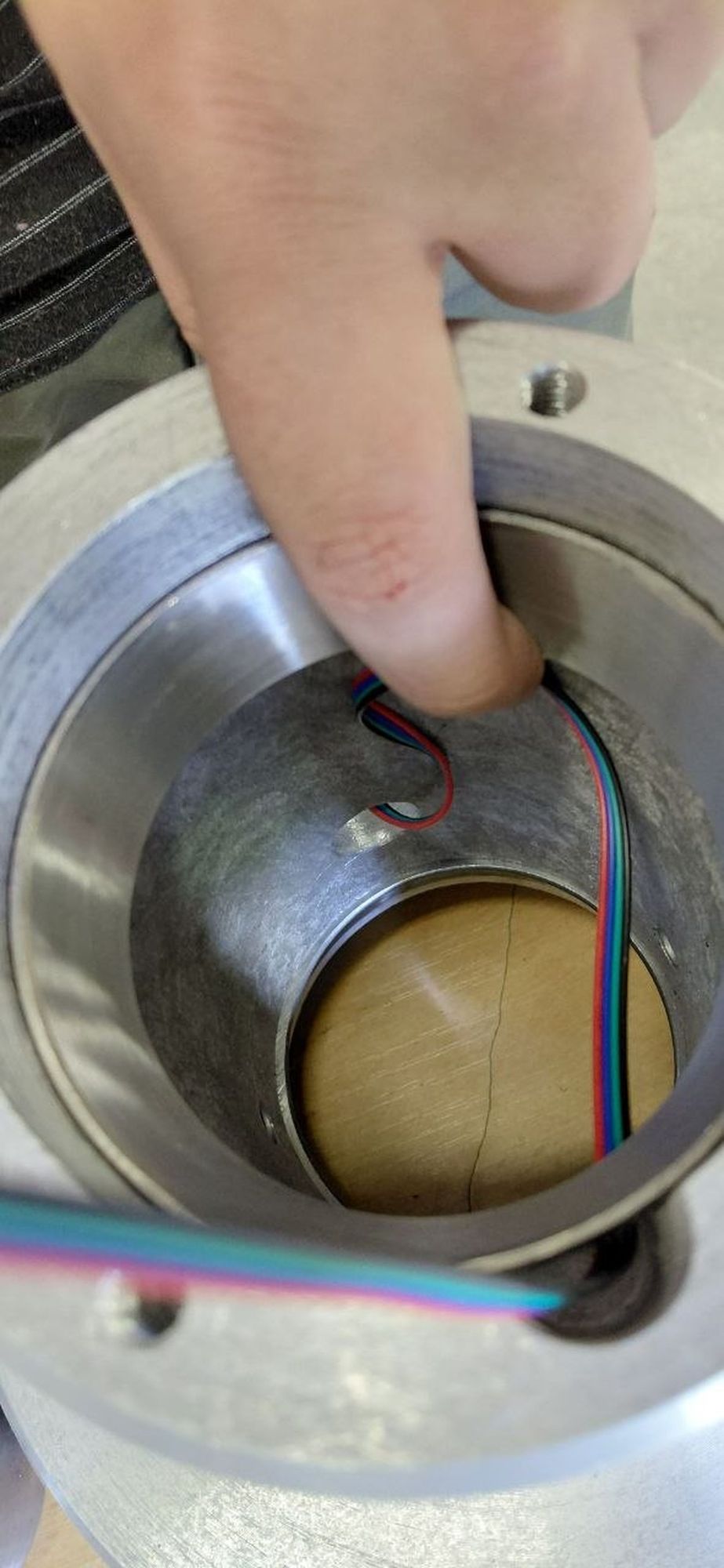

V druhom kroku sme osadili ložiská na os, odrezali a nalepili enkoderový pás na príslušný kotúč a magnetický pásik sme prekryli ochrannou antikorovou páskou. Nasledovalo označenie polohy spoja enkodéra, aby sme vedeli, na ktorom mieste sa nachádza. Nasledovalo navŕtanie dier na úchyt motora a snímača enkodéra na puzdre osi. Nalisovaním posledného ložiska sa uzavrela a skompletizovala os rektascenzie a mohli sme ju osadiť na základňu. Využili sme pripravenú antikorovú bižutériu, ktorú dal vyrobiť Samo. Tým bola osadená prvá os, mohli sme ju netrpezlivo vyskúšať. Prototyp ovládania motora, ktorý bol použitý pri brúsení osí, sme pripojili k RA motoru a začali sme nastavovať prítlak primárnej a sekundárnej prevodovky. Ukázalo sa, že montáž má slušný krútiaci moment a bolo potrebné vynaložiť značnú silu, aby oska prekĺzla.


Po veľmi dobrom obede od šéfkuchára, sme už nacvičení na prvej osi, zopakovali postup pre deklinačnú os. Po nalisovaní ložiska, pritiahnutí matice a skompletizovaní osy Samo pokľakol a pristúpil k pripojeniu deklinačnej. Pripojili sme tyč protizávažia, dočasne sme namontovali Losmandy úchyt (kým budú vyrobené montážne platne) a Samo nastavil správnu vzdialenosť snímačov enkodérov od pásikov. Indikátorom boli dve diódy v puzdre.



Posledným krokom bolo pozapájanie káblov vedených vnútrom montáže do koncovky na RA osi. Samo pripojil svoj ďalekohľad, páskou sme prilepili kúsok odrezanej tyče protizávažia a zostava bola v podstate dokonale vyvážená. Za povšimnutie stojí tučný kábel vedúci z koncovky RA osi do riadiacej jednotky OnStep X, čo je nateraz jediná kabeláž vedúca z montáže. Druhý kábel, ktorý v budúcnosti pôjde von, bude USB kábel na pripojenie zariadení k PC. Kompletný popis kabeláže a elektroniky bol uverejnený v druhej časti stavebného denníka.


No a napokon fotografia skompletizovaného prototypu aj s mierkou (živý človek štandardných rozmerov).

Tento kus (montáž, nie človek) teraz bude podrobený testom a ladeniu. Pri postupe kompletizácie sme si poznamenali technicky drobné, no pre samotný postup skladania ďalších kusov dôležité informácie.