O tom, ako rôzne zdroje šumu ovplyvňujú kvalitu astrofotografie, sa popísalo veľa. Informácií je dosť a sú pomerne jednoznačné. Menšia zhoda panuje na tom, kde je hranica optimálnej expozície a počtu jednotlivých snímok, keď sa expozícia objektu rozdelí na viac jednotlivých snímok ktoré sa potom spriemerujú (typická situácia v astrofotografii slabých objektov).Na tieto tému prebiehajú niekedy vášnivé diskusie a v nich sa vyskytujú aj rozporuplné tvrdenia, napríklad:
- Potrebný čas fotenia slabých deep-sky objektov závisí len na priemere objektívu, nie na jeho svetelnosti.
- Na svetelnosti objektívu záleží, 2-násobná svetelnosť skráti expozíciu na ¼.
- Polovičný vyčítací šum skráti expozíciu na ¼.
- Je vždy lepšie robiť čo najdlhšie jednotlivé expozície a vtedy ich stačí menej.
- Na to, aby sa dal šum potlačiť a využili sa štatistické nástroje pri spracovaní, treba mať čo najviac jednotlivých snímok a nemusia byť extrémne dlhé.
- Záleží len na celkovom čase fotenia, je jedno či fotím 120x1min alebo 12×10 min, stále sú to tie isté 2hodiny.
- Binning 2×2 umožní skrátiť celkový čas expozície 4x.
- Histogram má začínať v 30% rozsahu (20%, 50%…)
- Na dobrú fotku treba aspoň 100 snímok (alebo: 5h, 10h, 20h, ….)
Možno sú všetky tieto tvrdenia pravdivé, záleží len na tom z akých predpokladov autor vychádza a na akú otázku sa hľadá odpoveď. Keď nie sú celkom jasné východiská pre takéto tvrdenia, ľahko môže dôjsť k mylnej interpretácii aj pravdivých faktov. Táto situácia bola pre mňa motiváciou k výrobe jednoduchého simulačného programu, ktorý by umožnil odhadnúť parametre signálu a šumu pri zmene rôznych parametrov kamery, optiky, a expozície. Vychádza sa z určitej referenčnej snímky so známymi (odmeranými) vlastnosťami, a cieľom je:
- Určenie najslabšieho zobrazeného signálu
- Výpočet odstupu signálu od šumu (S/N)
- Vizualizácia vplyvu parametrov kamery a optiky, jasu oblohy a pod. na signál a šum
- Určenie optimálneho expozičného času jednotlivých snímok
- Určenie optimálneho počtu jednotlivých snímok
- Voľba vhodných parametrov RGB snímok a vplyv binningu
- Určenie vplyvu kalibračných snímok (bias, flat, dark) na výslednú fotografiu
Je dobré pozrieť sa na konkrétne čísla a pochopiť ich význam pri simulácii rôznych parametrov signálu a šumu.
Simulačný program
Používatelia si môžu stiahnuť program (zošit vo formáte Microsoft Excel) Optimalna_expozicia_a_sum_v_astrofotografii. Predpokladá sa, že užívateľ má základné teoretické aj praktické znalosti v astrofotografii. Program obsahuje jednoduché známe závislosti intenzity signálu na rôznych parametroch a vlastnosti 3 druhov zdrojov šumu: fotónového, vyčítacieho, a tepelného + šum od kalibračných snímok. Vyčítací šum je deklarovaný výrobcom kamery, fotónový šum je funkciou snímaného signálu a parametrov kamery, a tepelný šum sa do programu zadáva priamo ako hodnota odmeraná z referenčnej snímky (jeho teoretický model by bol silne závislý na vlastnostiach konkrétnej kamery). Moderné programy na spracovanie astrofotografií umožňujú priamo odmerať šumové parametre snímky, dokonca aj parametre kamery. Program počíta aj šum kalibračných snímok a ich vplyv na šum výslednej fotografie.
Do xls súboru za zadajú parametre referenčnej expozície (modré bunky) a parametre pre expozíciu ktorá sa programom simuluje (červené bunky). V ostatných bunkách sú vypočítané hodnoty. Grafy ukážu signál a šum simulovanej snímky. Účelom je zobraziť slabý signál, ktorého úroveň sa veľmi nelíši od signálu pozadia.
Vplyv expozičného času jednotlivej snímky a počtu snímok na zobrazený signál
Ak by obloha bola dokonale čierna bez signálu pozadia, veľa vecí by sa zjednodušilo. Realita je bohužiaľ iná a to je hlavný dôvod, prečo je nutné robiť série snímok ktoré sa potom priemerujú a ďalej spracovávajú. Cieľom je znížiť náhodné zložky signálu (t.j. šum) a zachovať užitočný signál, ktorý sa opakuje v každej snímke.
V klasickej fotografii je základnou úlohou určiť správnu expozíciu, t.j. množstvo svetla zachytené snímačom. Astrofotografia sa v tomto nelíši a tiež tu existuje horná aj dolná hranica expozičného času, pokiaľ má byť snímaná scéna správne zobrazená. Horná hranica jednotlivej snímky je určená saturáciou jasných hviezd alebo aj snímaného objektu a autor tu má určitú voľnosť pri rozhodovaní ktoré časti scény môžu byť nasaturované bez toho, aby to významne vadilo.
Existuje však aj dolná hranica expozície, aby na jednotlivej snímke bol zachytený slabý signál požadovanej úrovne. Simulačný program obsahuje bunku „signál“, kde sa zadá svetelný tok požadovaného signálu ako počet fotónov, ktoré dopadnú na jeden pixel za jednu minútu expozície. Pri typických snímkach deep-sky objektov sa jedná rádovo o stovky fotónov zachytených snímačom na každý pixel z pozadia oblohy, a niekoľko fotónov slabého signálu fotografovaného objektu. Dá sa povedať, že slabý signál presvitá cez svetlé pozadie oblohy, pričom si na seba zoberie šum pozadia oblohy (fotónový šum oblohy je niekoľkokrát vyšší ako fotónový šum takto slabého signálu, preto takto slabý signál nie je možné vidieť na jednotlivej snímke). Aby sa takýto slabý signál zachytil, je nutný určitý minimálny expozičný čas jednotlivej snímky. Čím slabší signál chcem zachytiť, tým dlhšie musím exponovať každú jednotlivú snímku, aby signál ktorý sa má zachytiť, dosiahol určitú rozumnú intenzitu na snímke. Platí to priamo úmerne k expozičnému času. Simulačný program vypočíta úroveň takto definovaného slabého signálu v ADU.
Snímky je dobré opakovať a priemerovať z viacerých dôvodov – hlavným dôvodom je znížiť náhodný šum. Tu už neplatí priama úmera: náhodný šum signálu (akéhokoľvek pôvodu) klesá s odmocninou počtu snímok. Tepelný a fotónový šum klesajú aj s odmocninou dĺžky expozície. Aby sa na fotografii zobrazil určitý signál, musí byť jeho signál vyššší ako šum pozadia; čím je tento rozdiel väčší, tým je objekt zreteľnejšie zobrazený na zašumenom pozadí.
Kritérium pre najslabší zobrazený signál
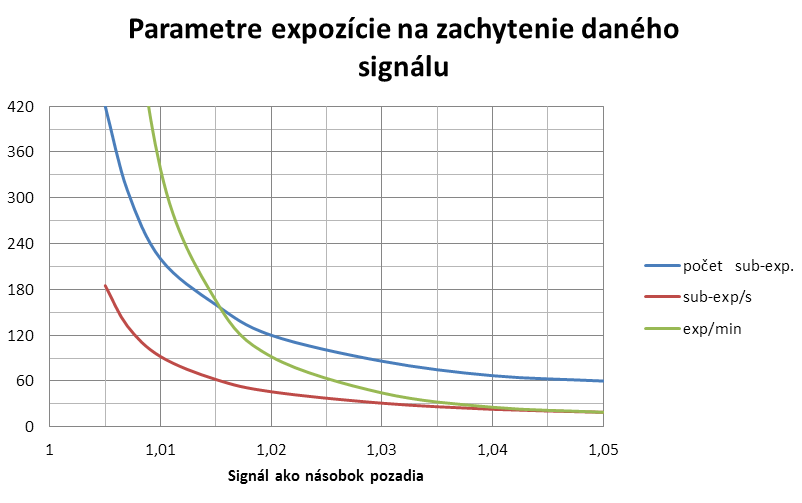
Kritérium pre to, aby sa slabý signál objektu zobrazil na zašumenom pozadí, je všeobecne uznávané ako signál, ktorého úroveň oproti pozadiu je aspoň 2x vyššia ako šum pozadia. Simulačný program túto situáciu jednoducho zobrazuje.
S kritériom pre minimálnu užitočnú úroveň signálu na jednej snímke je to menej jednoznačné. Rôzne zdroje uvádzajú rôzne kritériá, napríklad:
- signál musí byť vyšší o 15 ADU ako pozadie (aby kvantovaný šum mal charakter náhodného signálu),
- signál musí byť vyšší o 10 ADU ako pozadie (aby sa kvantovaný šum aspoň podobal na náhodný signál),
- signál musí vygenerovať aspoň jeden elektrón na väčšine snímok, aby sa odlíšil od šumu,
- signál musí mať takú intenzitu, aby vyčítací šum tvoril max. 5% fotónového šumu signálu,
- atď.
kritériá sa dajú zvoliť rôzne a potom samozrejme vedú k rôznym výsledkom, ale nič to nemení na princípe, že:
- dĺžka expozície jednotlivej snímky určí úroveň slabého signálu na výslednej fotografii v ADU, a zároveň
- počet expozícií rozhodne o tom, nakoľko sa zníži šum pozadia oblohy (a tým aj odstup signálu od šumu).
Tieto dva parametre sa dajú jednoducho odskúšať. Stačí urobiť dostatočne dlhú sériu snímok objektu za približne rovnakých podmienok a následne z nich vyrobiť spriemerované obrázky z rôzneho počtu snímok. Porovnaním týchto obrázkov sa dá vidieť, ako postupne klesá prínos pridávania ďalších snímok. Nasledujúci príklad ukazuje fotografie objektu zložené z rôzneho počtu snímok exponovaných 30s a 60s. Názvy obrázkov obsahujú informáciu o ich expozícii. Na identických miestach obrázkov boli vybraté 3 oblasti:
- vzorka pozadia – Preview05
- vzorka slabého signálu, ktorý sa ešte dá jednoznačne rozoznať od pozadia – Preview09
- vzorka veľmi slabého signálu, ktorý sa dá ledva rozoznať od pozadia – Preview02
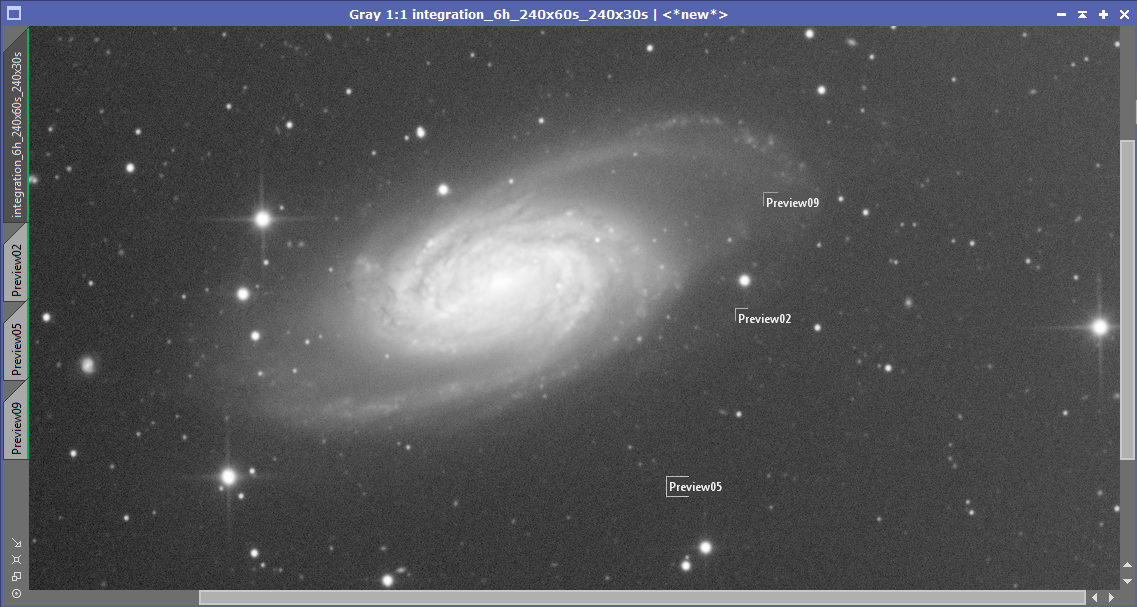
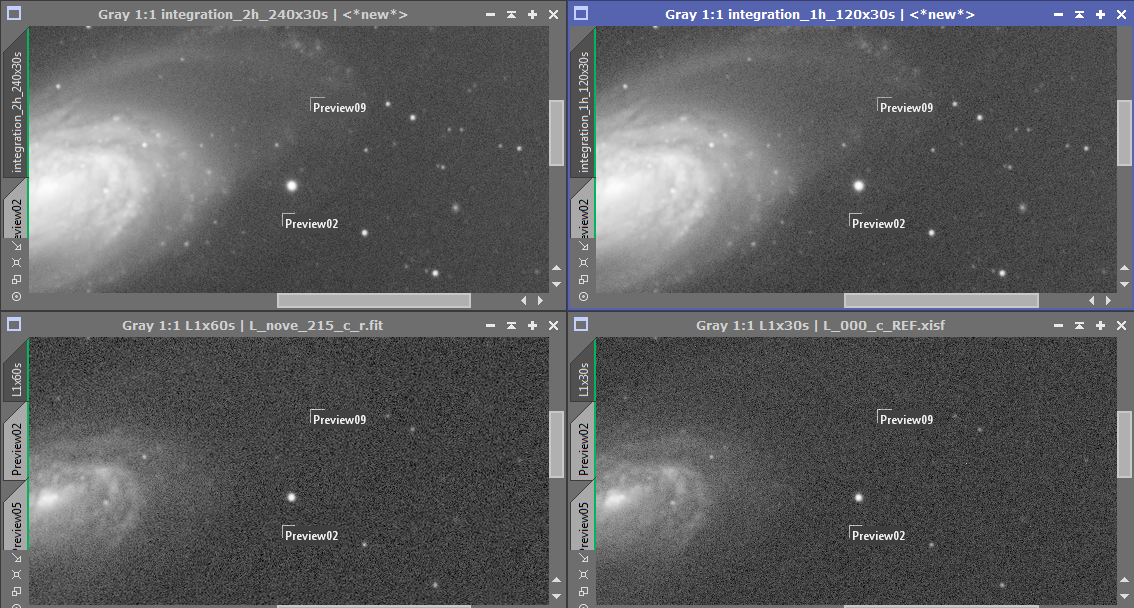
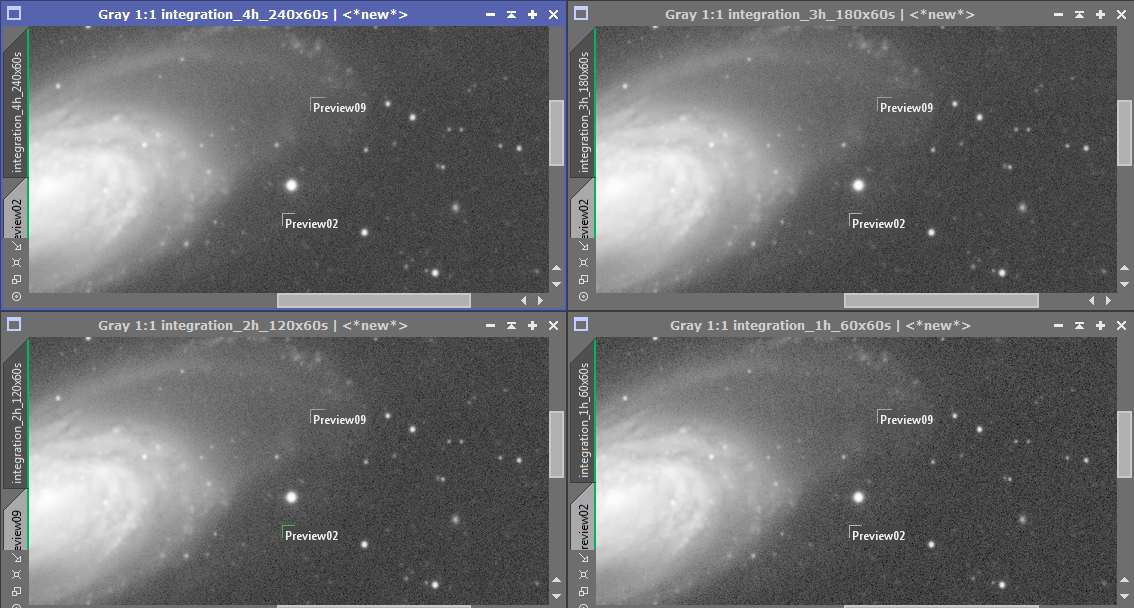
Z uvedeného príkladu vidno, že pridávanie snímok do výsledného priemeru spôsobuje, že z obrázku sa postupne vynárajú ďalšie a ďalšie detaily – bodový aj plošný slabý signál. Prínos ďalších snímok ku zníženiu šumu sa však postupne znižuje. Nasledujúca tabuľka obsahuje parametre vyššie uvedenej série fotografií jednak predpovedané simulačným programom, ako aj priamo odmeranú intenzitu signálu a jeho šumu v programe Pixinsight:
| Expozícia výslednej fotografie | Slabý signál (Preview09) – zreteľný na pozadí (Preview05), v ADU | Slabý signál (Preview02) – na hranici viditeľnosti na pozadí (Preview05), v ADU | ||
| Vypočítaný* | Odmeraný** | Vypočítaný* | Odmeraný** | |
| 1x30s snímka | 9 ± 42 | 15 ± 42 (43) | 5 ± 42 | 12 ± 37 (43) |
| 1h z 30s snímok | 9,2 ± 3,8 | 10,2 ± 3,9 (3,9) | 5,1 ± 3,8 | 5,4 ± 3,9 (3,9) |
| 2h z 30s snímok | 9,2 ± 2,7 | 10,2 ± 3,2 (2,7) | 5,1 ± 2,7 | 5,4 ± 2,9 (2,7) |
| 1x60s snímka | 18 ± 63 | 17 ± 63 (60) | 10 ± 63 | 6 ± 48 (60) |
| 1h zo 60s snímok | 18,3 ± 7,6 | 17,4 ± 8,0 (6,8) | 10,2 ± 7,6 | 9,6 ± 7,0 (6,8) |
| 2h zo 60s snímok | 18,3 ± 5,2 | 17,7 ± 5,0 (5,0) | 10,2 ± 5,2 | 9,5 ± 5,0 (5,0) |
| 3h zo 60s snímok | 18,3 ± 4,6 | 17,9 ± 4,8 (4,2) | 10,2 ± 4,6 | 9,4 ± 4,4 (4,2) |
| 4h zo 60s snímok | 18,3 ± 4,3 | 18,1 ± 4,2 (4,1) | 10,2 ± 4,3 | 9,1 ± 4,0 (4,1) |
| 6h z 30- 60s snímok | 13,8 ± 2,8 | 13,2 ± 2,8 (2,3) | 7,6 ± 2,8 | 6,8 ± 2,4 (2,3) |
Poznámky k tabuľke:
*Z fotografií nie je možné určiť skutočný svetelný tok danej vzorky signálu. V tabuľke je použitá najbližšia celočíselná hodnota – 9 fotónov na pixel za minútu pre Preview09, a 5 fotónov na pixel za minútu pre Preview02. Tieto zvolené hodnoty nemajú vplyv na výpočet šumu pozadia.
**V zátvorke je uvedené číslo pre šum pozadia (z Preview05). Tento šum by mal byť rovnaký ako šum signálu podobných úrovní ako pozadie; odchýlky môžu byť spôsobené nehomogenitou svetelného toku na plochu vzorky signálu ako aj malou plochou vzorky signálu.
Nezávisle na tom kedy sa fotograf rozhodne, že pridávanie ďalších snímok prestáva mať prínos z hľadiska informačnej hodnoty fotografie, alebo kedy začne považovať spriemerovaný obraz za dostatočne odšumený, prípadne kedy sa začnú prejavovať problémy nedokonalej kalibrácie snímok, vyššie uvedené princípy platia rovnako. Je to len otázka toho, akými číslami sa vyjadria kritériá kvality výslednej fotografie z hľadiska zobrazenia slabého signálu. Pôjde vždy o dve čísla: najslabší zobrazený signál a najvyšší prípustný šum.
Kritériá pre najvyšší prípustný šum
Kým sa predlžovaním expozičného času jednotlivej snímky priamo úmerne zvyšuje intenzita signálu, s potlačením jeho šumu to nie je také jednoduché. Všeobecne platí, že šum výslednej fotografie klesá s odmocninou celkového expozičného času série snímok. Simulačný program toto umožňuje jednoducho namodelovať.
V praxi to znamená, že každá ďalšia hodina expozície má stále menší vplyv na zníženie šumu (ako to vidno na príklade vyššie). Odmocninová závislosť šumu na celkovom expozičnom čase platí len do chvíle, kedy sa šum kalibračných snímok začne negatívne prejavovať na šume výslednej fotografie. Pri bežnom počte kalibračných snímok (cca 20) tieto nemajú vplyv na výslednú fotografiu až do S/N okolo 200 (keď šum je 0,5% intenzity signálu); dnešné bežné amatérske kamery dosiahnu túto hodnotu za 6-8 hodín expozície. Pri ďalšom predlžovaní expozície stúpa dôležitosť kvalitnej kalibrácie snímok a ich dostatočného počtu, a to nielen z hľadiska ich šumu, ale aj kvality, napríklad rovnomerného osvetlenia flat fieldu. Keď sa fotónový šum pozadia fotografie začne približovať k hodnote šumu kalibračných snímok – rádovo na hodnotu 5x vyššiu ako je šum kalibračných snímok a menej – prínos ďalšieho predlžovania expozície sa spomaľuje ešte viac.
Na vyššie uvedenom príklade sa dá vidieť rozdiel vo fotografii zloženej zo 120 snímok po 60s a oproti fotografii zloženej z 240 snímok po 30s. Aj keď sú obidve na pohľad rovnaké a majú aj približne rovnaký pomer S/N, fotografia zložená z 2x dlhších snímok má 2x vyššiu intenzitu signálu aj šumu. Takáto fotografia vyžaduje menej agresívne zosilnenie na zviditeľnenie slabého signálu a menej sa na nej prejaví prípadná nedokonalosť kalibrácie snímok.
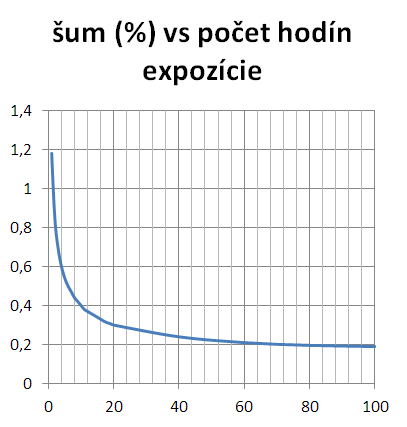
Na akú najmenšiu hodnotu ADU sa v praxi oplatí znižovať šum, je do istej miery subjektívne; záleží to od miery tolerancie fotografa na šum aj na tom, ako je zvyknutý spracovávať fotografie z hľadiska zvýšenia kontrastu na úrovni slabého signálu a miery použitia odšumovacích algoritmov. Simulačný program ukáže, že dostať sa na úroveň šumu pozadia pod 2ADU (pri rozumne dlhej expozícii jednotlivých snímok) je možné za cenu veľmi dlhej celkovej expozície, a potom sa kladú vysoké nároky na kvalitu kalibrácie snímok. Hodnota 3ADU pre šum, t.j. 6ADU pre najslabší zobrazený signál, je v praxi dosiahnuteľná pri expozičnom čase rádovo v hodinách pri rozumných nárokoch na počet a kvalitu kalibračných snímok. Pri vhodnej kombinácii počtu snímok a ich expozičného času je výsledný pomer S/N takto dlhej expozície približne 200, t.j. šum tvorí 0,5% úrovne signálu pozadia.
Nasledujúce grafy znázorňujú príklad ako sa mení S/N (alias šum pozadia ako % z intenzity pozadia) pri predlžovaní expozície, až do extrémnych hodnôt – 100h.
Optimálna kombinácia expozičného času a počtu snímok
Uvedený príklad ukazuje, že pridávaním 1-minútových snímok do výsledného obrázku sa po 4h celkovej expozície znížil šum natoľko, že sa zviditeľnil najslabší zachytený signál na úrovni 9ADU. Celkový počet snímok bol teda 240. Čo ak by sa fotograf rozhodol, že mu to nestačí a chce zachytiť 2x slabší signál? Ak chce zachovať kvalitu fotografie a vyhnúť sa prípadným ďalším problémom ktoré sa môžu vyskytnúť pri nízkej intenzite signálu, teda chce mať tento signál zachytený s rovnakou intenzitou ako predtým naexponovaný najslabší dosiahnuteľný signál, potrebuje exponovať 2 minúty. Pre zachovanie pomeru S/N musí zároveň zvýšiť počet snímok na dvojnásobok (=480). Celková expozícia sa teda predĺži 4x, t.j. na 16h. Pomer počtu snímok a expozície jednej snímky zostal teda rovnaký (240/60s=480/120s). Rovnako to platí aj v prípade skracovania celkovej expozície. Pri tejto kamere s daným objektívom a daných podmienkach toto predstavuje optimálny pomer pre zobrazenie akejkoľvek úrovne slabého signálu tak, aby najslabší zobrazený signál mal úroveň 2x vyššiu ako šum pozadia oblohy (po spriemerovaní snímok do výsledného obrázku). Tento pomer je samozrejme iný pre každú zostavu kamera + objektív.
Rovnaký výsledok sa dá samozrejme dosiahnuť aj tak, že sa predĺži expozičný čas jednotlivej snímky pri menšom počte snímok (v uvedenom príklade by to predstavovalo kombináciu 120 snímok po 120s). Celkový čas expozície zostane rovnaký (4h), úroveň najslabšieho zachyteného signálu na snímku exponovanom 60s bude pri 120s expozícii dvojnásobná, ale zdvojnásobí sa aj šum pozadia. Aby výsledná spriemerovaná fotografia zložená zo 120x 120s snímok nevyzerala viac zašumená ako fotografia zložená z 240x 60s snímok, aplikovaná gama korekcia (alias „stretch“ alebo zvýšenie kontrastu na úrovni pozadia) musí byť polovičná. Jednotlivé 120s snímky síce obsahujú slabší signál ako 60s snímky, tento je však „utopený“ v šume výslednej fotografie a pri takto definovanej gama korekcii sa ani nezobrazí na výslednej fotografii – potenciál dlhších expozícií zostane nevyužitý, pretože ich je málo.
Predlžovanie expozičného času jednotlivých snímok na úkor počtu snímok tak, aby zostal zachovaný celkový expozičný čas, môže mať niekoľko výhod ale aj nevýhod.
Výhody:
- je potrebné menej agresívne zvýšenie kontrastu,
- pri sústavách s vyšším šumom kamery a menšou svetelnosťou objektívu môže byť celkový čas fotenia výrazne kratší, keď sa celkový požadovaný čas expozície zloží z dlhších jednotlivých expozícií (napr. 40x 900s môže dať v tomto prípade kvalitnejší signál ako 80x 450s) – pozri ďalej.
Nevýhody:
- spriemerovanie seeingu počas dlhších časových úsekov: ak sa atmosféra na chvíľu ustáli, zlepší sa seeing a krátka expozícia by vtedy zachytila snímku s výrazne vyššou ostrosťou a lepším S/N. Dlhšia expozícia nemusí využiť takéto momenty, čo sa môže prejaviť na výslednej fotografii v prospech kratšie exponovaných jednotlivých snímok – pozri ďalej.
- menej snímok znamená horšie využitie štatistických nástrojov pri spracovaní dát.
- väčší odpad snímok pri nedokonalej pointácii alebo prelete lietadiel cez zorné pole kamery (toto nemusí byť problém pri dostatočnom počte snímok – štatistika pri spracovaní snímok si s takýmito situáciami vie poradiť).
- Zhoršenie dynamického rozsahu obrázku.
Nakoľko sa jednotlivé výhody a nevýhody môžu prejaviť závisí na konkrétnej sústave (kamera + optika + montáž), pozorovacích podmienkach, dynamickom rozsahu signálu fotografovanej scény, aj na počte snímok (či zníženie počtu snímok povedie k reálne horším dátam z hľadiska ich štatistického spracovania).
Vplyv šumových parametrov kamery
Aj keď existuje optimálna kombinácia expozičného času a počtu snímok, táto sa dá chápať ako počet snímok, pri ktorých sa optimálne využije signál zachytený snímačom pri danej expozícii. Nič však fotografovi nebráni predĺžiť tento čas a úmerne zmenšiť počet snímok; pokiaľ je počet snímok dostatočný z hľadiska štatistického spracovania dát, takýto posun oproti optimálnemu pomeru počtu snímok a expozičného času sa dá považovať za neškodný – stratia sa tým však výhody krátkych expozícií. Pre určité zostavy kamier a objektívov však môže byť predĺženie expozície užitočné, pretože môže výrazne skrátiť celkový čas fotenia, ako to ukazuje nasledujúci príklad. Graf ukazuje príklad dvoch bežných kamier, ktoré majú zobraziť obraz v rovnakej mierke s rovnakým pomerom S/N:
- Snímač KAF-8300 s objektívom 254/2000mm
- Snímač ICX285 s objektívom 254/1200mm
Z grafov je vidieť, že obe zostavy sa správajú inak: u prvej má zmysel predlžovanie času expozície jednotlivých snímok, pretože to významne šetrí celkový čas fotenia; pri skracovaní expozičného času jednotlivých snímok sa celkový čas fotenia predlžuje (rádovo až v hodinách u kratších expozícií). U druhej zostavy nemá praktický význam uvažovať s týmto javom pri snímkach exponovaných dlhšie ako 1min.
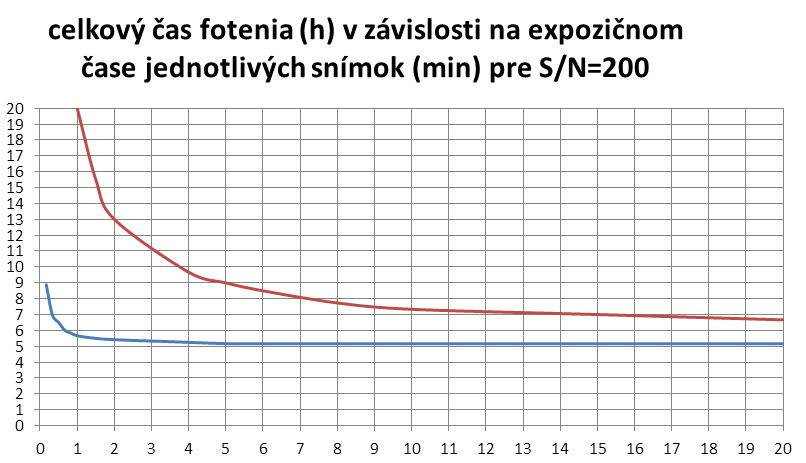
Vodorovná časť krivky u senzora ICX285 so svetelným objektívom znamená, že vplyv vyčítacieho šumu kamery na celkový šum obrazu je zanedbateľný a obraz obsahuje už len fotónový šum signálu. Pri extrémne dlhých expozíciách však začne znova narastať celkový expozičný čas potrebný na dosiahnutie rovnakého pomeru S/N; stane sa tak vtedy, keď sa na fotografii začne prejavovať šum kalibračných snímok.
Vplyv parametrov objektívu a veľkosti obrazového bodu
Simulačný program vypočíta úroveň signálu a šumu pri zmene parametrov objektívu (napríklad keď sa kamera nasadí na iný ďalekohľad alebo sa nastaví iná clona objektívu), pri zmene parametrov kamery (napríklad keď sa na rovnaký ďalekohľad nasadí iná kamera), alebo obidvoch (napríklad pri posúdení, či sa určitý objekt odfotený určitou zostavou kamera + objektív pri daných parametroch expozície dá odfotiť inou zostavou, a aké parametre expozície sú na to potrebné).
Dôležitou premennou, ktorá má významný vplyv na to, aký bude celkový šum (a tým aj pomer S/N) ZOBRAZENÉHO objektu je mierka obrazu; zadá sa ako lineárny pomer rozlíšenia kamery v pomere k rozlíšeniu monitora. Situáciu komplikuje aj to, že kamera a monitor môžu mať rozličné pomery strán a rozličný počet obrazových bodov, prípadne sa môže na monitore zobraziť len výsek obrazu. Preto simulačný program predpokladá, že užívateľ pozná lineárny pomer mierky zobrazenej scény oproti mierke nasnímanej scény (tento údaj je často uvedený v prehliadačoch obrázkov), a priamo zadá tento údaj ako vstupný parameter: napríklad číslo 2 znamená, že každý bod obrazu na monitore alebo na vytlačenej fotografii obsahuje 2×2 obrazové body (pixely) snímača (tento údaj sa môže zobraziť v prehliadači obrázkov ako mierka 1:2 alebo 50%). Takéto zmenšovanie obrazu má vplyv na šum; tento príklad znamená, že fotografia zobrazená na monitore v mierke 1:2 má 2x lepší pomer S/N, pretože signál aj šum sa v každom zobrazenom bode spriemerujú zo 4 pixelov snímača.
U plošného signálu všeobecne platí, že sa jeho intenzita na fotografii (= svetelný tok na pixel) mení s druhou mocninou zmeny clonového čísla objektívu. U bodového signálu to platí tiež, pokiaľ je priemer zobrazeného bodu (napr. hviezdy) daný seeingom a pokrýva aspoň niekoľko pixelov. Toto je typická situácia pri fotení deep-sky objektov, okrem situácií keď sa fotí objektívom s malou ohniskovou vzdialenosťou (rádovo 25-50cm a menej pri bežných veľkostiach pixelov a seeingu). Intenzita signálu bodového zdroja navyše závisí od priemeru objektívu: pri rovnakej kamere, clonovom čísle a expozičnom čase, objektív s väčším priemerom zobrazí slabšie hviezdy ako objektív s menším priemerom. Vyplýva to z charakteru svetelného toku z bodového zdroja (určitý počet fotónov na plochu objektívu za určitý čas) v porovnaní so svetelným tokom z plošného zdroja (určitý počet fotónov z plochy zdroja na plochu objektívu za určitý čas, kde sa plochy vykrátia a zostane len počet fotónov / čas). Tento jav sa prejaví tým významnejšie, čím viac má daný detail obrázku charakter bodového zdroja svetla.
Simulačný program ukáže, ako rýchlo sa zvyšuje dosah fotografie z hľadiska zvýšenia intenzity signálu bodových zdrojov, keď sa zväčšuje priemer objektívu. V opačnom prípade, keď je cieľom nafotiť rovnako slabé hviezdy menším objektívom, do istej miery je možné to kompenzovať predlžovaním expozície; pri veľkom rozdiele priemerov objektívu sa však ukáže, že malý objektív nedokáže zobraziť slabé hviezdy a bodové detaily takej intenzity ako objektív s väčším priemerom – zobrazenie plošných objektov sa nezmení, v obraze však chýbajú hviezdy a malé detaily.
Vplyv binningu
Simulačný program obsahuje aj prepočet parametrov signálu a šumu snímok fotených cez farebné filtre – v prípade že „referenčná expozícia“ aj „expozícia“ sú fotografované cez filter L. Program navrhne expozičný čas jednotlivých kanálov RGB podľa vopred zisteného pomeru expozícií tak, aby jednotlivé RGB snímky mali približne rovnakú intenzitu signálu a pozadia.
Spájanie pixelov pri vyčítaní signálu (binning) sa bežne používa pri fotení RGB snímok. Dôvodom je asi to, že RGB snímky sa pri LRGB kombinácii môžu rozostriť a zároveň sa skráti expozičný čas jednotlivých snímok na ¼. Čo sa ešte stane pri použití binningu 2×2:
- Každý vadný pixel (horúci alebo studený) kontaminuje ďalšie 3, pričom jas výsledného obrazového bodu sa priblíži k úrovni signálu a ťažšie sa identifikuje ako odľahlá hodnota v číselnom rade pixelov pri integrácii snímok.
- Zhorší sa dynamický rozsah snímky.
- U zostáv, kde sa slabá hviezda zobrazí na malom počte pixelov, dôjde po binningu ku zhoršeniu tvaru hviezd a posunom pri registrácii jednotlivých snímok.
- Ak sa plánovaný počet snímok zachová a ich expozičný čas sa skráti na ¼, šum výslednej fotografie klesne na 1/2; výsledkom je 2x horší S/N a jeho potlačenie bude vyžadovať agresívnejšie odšumenie alebo rozmazanie obrázku.
Tento 2x horší S/N sa dá dohnať 4x dlhším časom exponovania, čím by sa stratil pôvodný cieľ celej operácie – skrátiť expozičný čas; rovnaký výsledok (2x horší S/N) sa dá dosiahnuť aj tak, že sa zachová plánovaný expozičný čas jednotlivých snímok, ale ich počet sa zníži 4x.
Binning má zmysel len vtedy, keď použitie optických filtrov vedie k takým dlhým expozičným časom jednotlivých snímok, ktoré by sa nedali nafotiť napríklad kvôli problémom s pointáciou alebo stáčaní poľa spôsobenom chybou v polárnom nastavení montáže.
Vplyv jasu pozadia oblohy
Simulačný program umožňuje zobraziť čo sa deje s obrazom, keď sa mení jas pozadia oblohy (napríklad pri dlhej sérii snímok alebo pri fotení toho istého objektu počas inej noci za iných podmienok). Najlepšie sa tento vplyv ukáže na príklade.
Sú výborné podmienky, tmavá obloha a chcem odfotiť slabý objekt expozíciou asi 4h. Podľa skúseností viem, že s mojou zostavou kamera + objektív, spôsobom kalibrácie fotografií a spracovania snímok nemám problémy až do úrovne šumu pozadia 3 ADU a tomu zodpovedajúcej úrovni najslabšieho zachyteného signálu 6 ADU. Simulačný program mi na základe stanovených kritérií navrhne rozdeliť celkovú expozíciu na 240 snímok po 60s. Na snímkach mám pozadie 718 ADU (zadám to ako pozadie referenčnej snímky) a pokusným zadávaním hodnôt svetelného toku zistím, že najslabší zachytený signál na tejto fotografii bude pochádzať z 3 fotónov za minútu na pixel.
Nestihnem to však nafotiť počas jednej noci a rozhodnem sa pokračovať inokedy, ale to už je milý Mesiac na oblohe a jas pozadia stúpol na hodnotu 968 ADU (t.j. o 50% pri hodnote biasu 218 ADU). Zadám túto skutočnú hodnotu pozadia do simulačného programu a vidím, že:
- intenzita signálu oproti pozadiu sa nezmenila – stále má 6,1 ADU,
- šum pozadia oblohy stúpol na 3,4 ADU,
- na dosiahnutie rovnakých kritérií kvality snímky ako predtým (signál 6,1 ADU a jeho šum 3,1 ADU) musím nafotiť 360 snímok po 60s, teda o 2h viac.
Naopak, ak by sa podmienky počas fotenia zlepšili a jas pozadia oblohy by klesol, mohol by som sa rozhodnúť, či:
- Skrátim expozičný čas jednotlivých snímok tak aby som zachoval kritériá kvality a dofotím požadovanú sériu skôr (a potom môžem fotiť iný objekt), alebo
- Využijem situáciu, že pri tmavšia obloha mi umožní fotiť slabší signál, čo síce povedie k predĺženiu expozičného času jednotlivých snímok aj ich počtu, ale lepšie využijem aktuálne podmienky tmavšej oblohy.
Ak predpokladám, že sa jas pozadia môže zvýšiť (hlavne keď sa dlhá celková expozícia objektu rozdelí na viac nocí), je dobré nastaviť expozičný čas jednotlivých snímok o niečo dlhší než ten ktorý navrhol simulačný program – aby sa vytvorila určitá rezerva pre prípadné zhoršovanie podmienok; inak hrozí, že signál ktorý je tak slabý že pri tmavej oblohe bol na hranici možností, odfotím na svetlejšej oblohe za cenu neúmerného predlžovania času fotenia, prípadne ho už potom nezachytím vôbec – pretože sa stratí v šume jasného pozadia oblohy.
Vplyv seeingu
Vplyv jasu pozadia oblohy na fotografovaný signál a jeho šum sa dá do istej miery odhadnúť a kompenzovať, ale zmena seeingu počas fotenia je vec ďaleko menej predvídateľná a má významný dopad na kvalitu snímok. Simulačný program síce neumožňuje modelovať seeing, jeho vplyv sa však dá odhadnúť z parametrov signálu a šumu bodového zdroja. Najlepšie to ukáže príklad.
Fotím sériu snímok a priemerná FWHM hviezdy je 2,8“. Na chvíľu sa seeing ustáli a nasledujúca fotografia má FWHM 2,0“. Aký to má vplyv na obraz:
- Energia bodového zdroja sa sústredí na 2x menšiu plochu, t.j. hviezdy a malé detaily objektu sú zrazu 2x jasnejšie,
- V obraze sú zrazu slabé hviezdy a malé detaily objektu, ktoré predtým nebolo vidieť keď ich intenzita bola 2x slabšia,
- Rozlíšenie detailov je 1,4x lepšie, obraz je ostrejší a lepšie prekreslený.
Zlepšenie S/N slabých hviezd a rozmerovo malých detailov objektu na dvojnásobok sa dá inak nahradiť 4x dlhšou expozíciou; lepšie uhlové rozlíšenie sa nedá nahradiť ničím. Z toho vidieť, že:
- Fotografie získané za výborných seeingových podmienok sú výrazne kvalitnejšie ako tie získané za priemerných podmienok.
- Keď sa seeing počas exponovania série snímok mení, má zmysel nastaviť čo najkratší rozumný čas expozície jednotlivých snímok, možno aj kratší ako je optimálna kombinácia expozičného času a počtu snímok navrhnutá simulačným programom.
Seeing nemá vplyv na intenzitu plošného zdroja signálu.
Záver
Intenzita signálu na fotografii a jeho šum sa riadia pomerne jednoduchými vzťahmi a zákonitosťami. Problém nie je v zložitosti vzťahov ale v tom, že na výslednú kvalitu fotografie vplýva mnoho parametrov naraz a nie je ľahké predstaviť si ich všetky vzájomné súvislosti. Jednoduchá simulácia v tabuľkovom procesore umožní pomerne presne namodelovať intenzitu signálu a jeho šum a tým aj odhadnúť, ako bude vyzerať slabý signál a pozadie na plánovanej fotografii. Pri rozdielnych kamerách, objektívoch a pozorovacích podmienkach môžu mať rôzne parametre rôznu dôležitosť, citlivosť a vplyv na kvalitu výslednej snímky. Simulačný program umožňuje:
- pochopiť súvislosti jednotlivých parametrov expozície, kamery, objektívu, jasu oblohy, a kalibračných snímok na kvalitu fotografie;
- určiť expozičný čas jednotlivej snímky tak, aby intenzita najslabšieho signálu ktorý sa má zachytiť bola dostatočná;
- určiť počet jednotlivých snímok tak, aby sa šum výslednej fotografie znížil na požadovanú úroveň a tým sa zviditeľnil požadovaný slabý signál na pozadí;
- optimalizovať počet snímok a ich expozičný čas, keď sa vopred stanoví celkový požadovaný expozičný čas pre daný objekt;
- určiť parametre snímok fotených cez filtre RGB alebo iné, aby tieto snímky a ich počet optimálne zodpovedali nasnímanému kanálu L z hľadiska šumu a intenzity signálu – s binningom alebo bez;
- určiť nevyhnutný počet kalibračných snímok (bias, flat, dark) tak, aby neovplyvnili šum fotografie a zároveň ich nebolo zbytočne veľa.
To je celkom dosť na jednoduchý výpočet v tabuľkovom procesore.
Autor: Ing. Miroslav Smolka