Neprešlo veľa času od výroby prenosnej montáže Fernão Magalhães, ktorá vznikala ešte v minulom roku niekedy od septembra do novembra a mala sa včas stihnúť postaviť na prápor čakania na kométu ZTF E3. O tejto montáži už pár slov padlo a na astro stretnutí na Vsetíne o nej odznela prednáška. Následne prišli ostré skúšky a stretnutia s kométou.
Okrem radostí, ktoré sprevádzajú uvedenie do života každý nový výrobok idú, celkom prirodzene, ruka v ruke aj menšie nedostatky z estetiky. Pri všetkých týchto radostiach i starostiach sa zúčastnil aj Samuel Toman.
Samuel Toman je v súčasnosti najaktívnejší člen z mladej generácie astronómov – amatérov. Môjmu všímavému oku neunikol záujem Sama ohľadom mojej novej montáže a pri našich rozhovoroch počas pozorovaní s ňou išla reč o prípadnom nákupe strednej paralaktickej montáže. Keďže v tom čase sa ešte postupy a miery z výroby mojej montáže nestihli prekryť nánosmi priplavovanými inými výrobkami, či inými prácami, zostalo do konca zimy tak akurát času na výrobu ešte jednej montáže. Zrod tejto myšlienky zostal však driemať pod rúškom utajenia, lebo prípadné skríženie jej výroby s inou povinnosťou, alebo udalosťou by znamenalo nedokončenie a odloženie celej zostavy na „potom“. Nerád totiž popredu sľubujem niečo, čo včas neprivediem do cieľa.
Výroba začala 21. februára. Tento deň je v našich spomienkach smutne spätý s úmrtím Františka Michálka. Práve takýto smutný deň nech je miestom spoja medzi spomienkou a víziou. Môže sa stať, že myšlienka na Františka bude pevná vkutá do železa a znova zamieri ku hviezdam. Je potrebné chrániť a nepretrhnúť túto starú a krehkú kontinuitu človeka a hviezd.
Montáž dostala meno Kadet 30. Celkom vystihuje jej určenie a zaradenie. Dokonca, ako sa ukázalo, aj omnoho viac, lebo práve kadet Samo je samo o sebe substancia so skrytým varom a ten ukázal v praxi ako dokáže „šplechnúť“ varenec do éteru svojim umom, rozvíjajúcou sa skúsenosťou a húževnatosťou. Elektronika montáže zostala celkom v jeho réžií.
Mechanika
Čo sa týka krátkej charakteristiky montáže Kadet 30 je potrebné popísať len technické odlišnosti, ktoré jej naoko verná sestrička Fernão Magalhães v sebe neobsahuje. Samuel totiž od začiatku pobádal k doplneniu pohonu v deklinácií. Ďalej, pri montážach mojej výroby sa ukázali nedostatky v presnosti zaradenia šnekových prevodov a ich dodatočnej regulácie prítlaku. Montáž Kadet 30 teda dostala pohon aj v deklinácií a všetky prevody majú šneky uložené v pružných uloženiach.

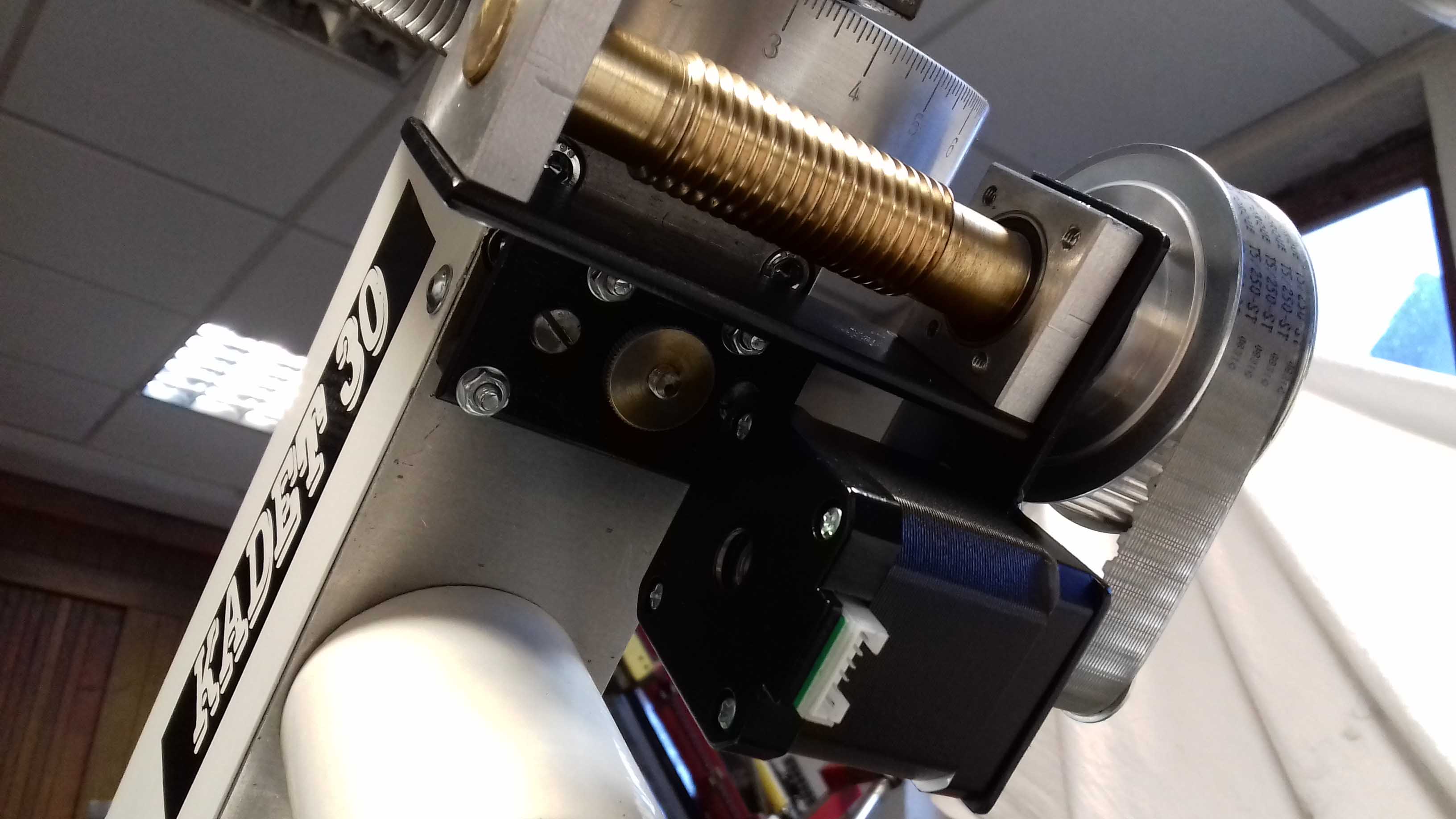


Naviac Kadet 30 má prvý prevod z motora na hlavný šnek riešený pomocou ozubeného remeňa v pomere 4:1 pre obe osi. Stručný technický opis sa viac už nelíši od Fernão Magalhães. Je to nemecká paralaktická montáž podľa predlohy Ivo Zajonc 1985 s vlastnými modifikáciami. Priemery oboch osí sú 30mm. Pri zbežnom pohľade na vedľa seba stojace montáže Magalhães a Kadet 30 viac rozdielov nebadať. Pohľad na ne sa však dramaticky zmení bodkou na konci mojej vety opisujúcej mechanickú časť a veľkým písmenom na začiatku vety napísanej už Samuelom Tomanom o stránke elektrickej…
Elektronika
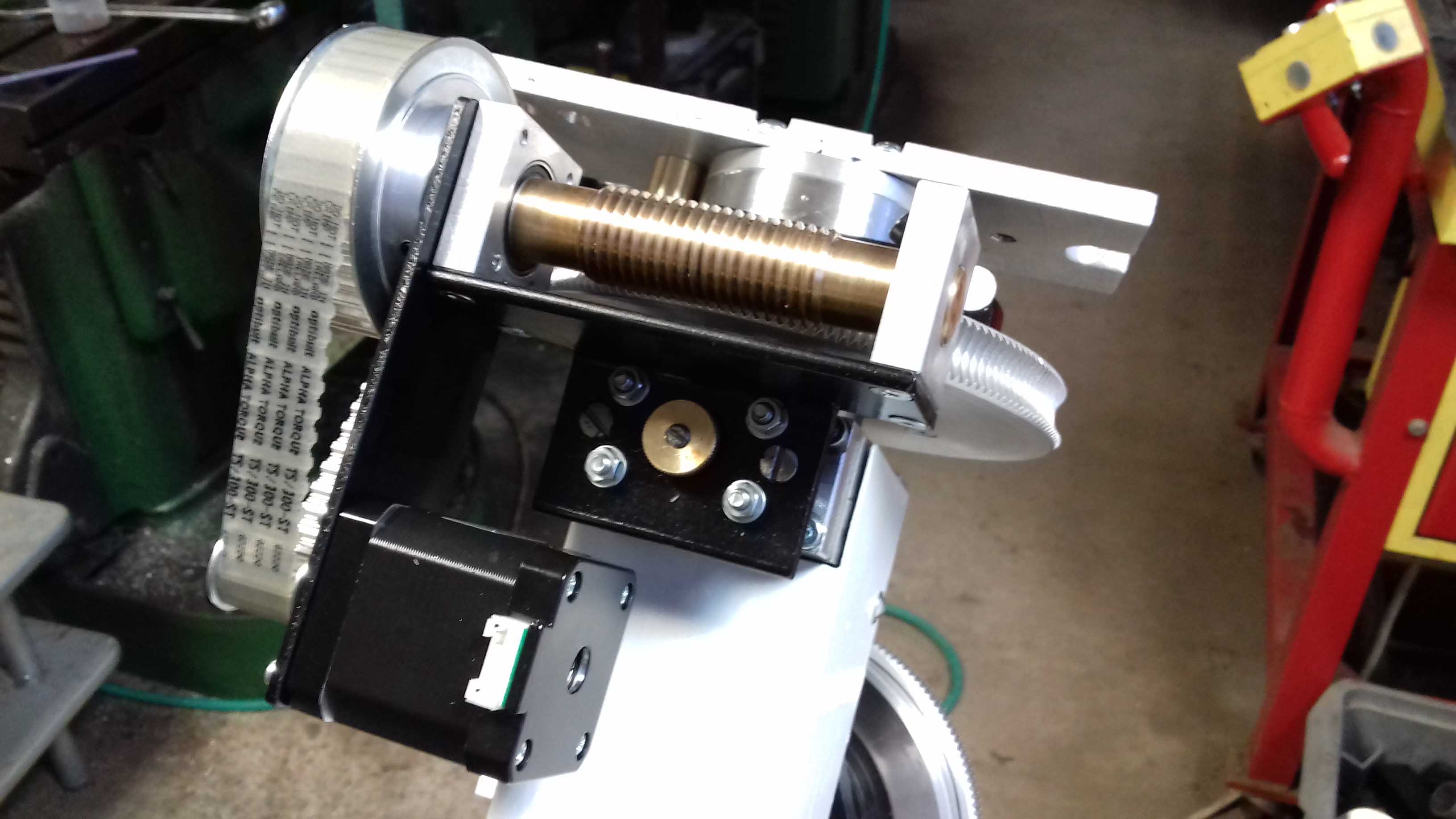
Celá vec o novej montáži vyplávala na povrch s podobným jasotom ako Magalhãesova plavba okolo sveta. Pôvodne mala montáž mať aj prvý stupeň prevodu riešený šnekovým prevodom 70:1 rovnako ako montáž Magalhães. To však vytvára v sérii s druhým šnekovým prevodom 178:1 zbytočne veľký prevodový pomer a motor pohonu v rektascenzii musí vyvinúť rýchlosť 8,5 otáčky za minútu. To je na krokový motor konštruovaný primárne pre pomalý a presný chod zbytočne veľa. Rozhodli sme sa s Borisom teda zameniť prvý stupeň za remeňový prevod 4:1. Krokový motor sa otočí teda približne raz za dve minúty. Podobný prevod má aj fabrická „konkurencia“ HEQ5.


Boris ma postavil pred dôležitú úlohu vdýchnuť železu život. Bez elektroniky by to bol len pekný počin strojárskeho umenia Prečínskeho majstra no bohužiaľ nepoužiteľný. Prvá myšlienka, ktorá mi napadla bolo, že riadenie postavím na elektronike riadenia anténneho rotátora pre satelitnú komunikáciu, ktorú som navrhol v rámci svojej bakalárskej práce. Je to v podstate jednoduché riadenie azimutálnej montáže. Dva motory s nejakou rýchlosťou otáčania. Táto elektronika však nemala možnosť externých pulzov nevyhnutných pre pointáciu cez ST4 port. Pointácia by musela byť riešená cez USB komunikáciu pomocu ASCOM alebo INDI protokolu. Vyžadovalo by si to však napísať nový program pre mikroprocesor, a taktiež aj driver pre ASCOM resp. INDI čím celá myšlienka naberala na komplikáciách.
Paralaktická montáž, či už v nemeckom alebo vidlicovom prevedení je azda najpoužívanejší koncept montáží v amatérskej astronómii a tak mi napadlo či náhodou nevymýšľam koleso. Strýco Google ma v mojom zmýšľaní utvrdil. Znovu som objavil projekt OnStep. Na ten som narazil už dávnejšie ale časom som naň zabudol. Teraz prišla jeho chvíľa.
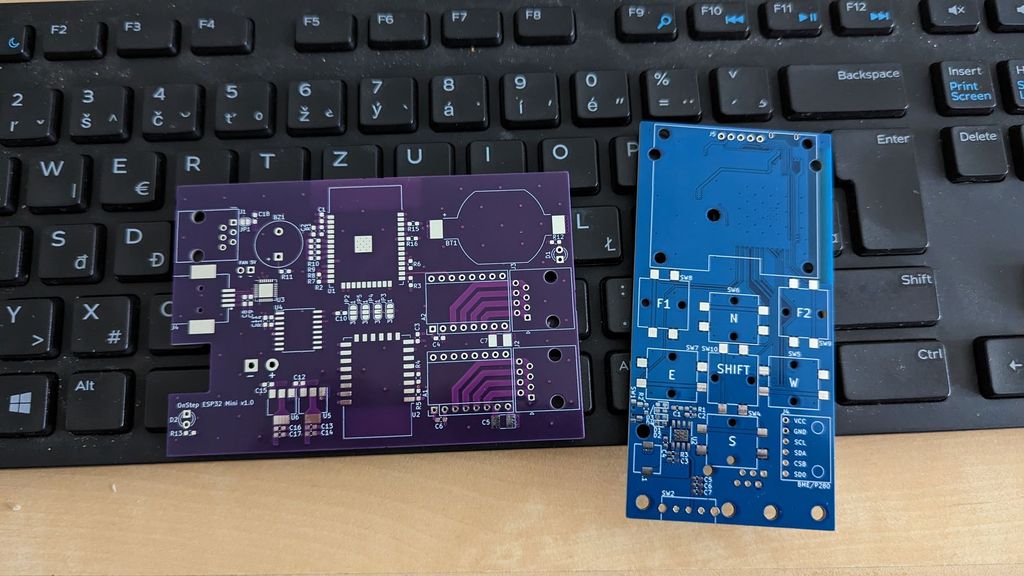
Projekt OnStep (https://onstep.groups.io/g/main/wiki/3860) má základ v roku 2012 kedy si autor Howard Dutton začal robiť riadenie pre svoju montáž Losmandy G11. Časom tento projekt zverejnil ako voľne dostupný. V súčasnosti je projekt na veľmi slušnej úrovni. Podporuje niekoľko rôznych mikrokontrolérov v rôznych cenových kategóriách a je možné vybrať si z niekoľkých dostupných hardvérových riešení ponúknutých buď priamo autorom alebo inými používateľmi. Aj keď to autor neodporúča, rozhodol som sa pre návrh vlastnej riadiacej elektroniky, keďže voči ponúkaným som mal niekoľko výhrad. Projekt umožňuje pripojenie cez WiFi k PC alebo smartfónu, ktorý slúži ako užívateľské rozhranie rovnako ako ovládače v prípade fabrických montáží. Je taktiež možné postaviť si podobný ovládač, ktorý je možné k montáži pripojiť buď káblom alebo bezdrôtovo práve cez WiFi. Rozhodol som sa pre bezdrôtové riešenie a rovnako elektroniku ovládača som si podľa predlohy troška upravil.
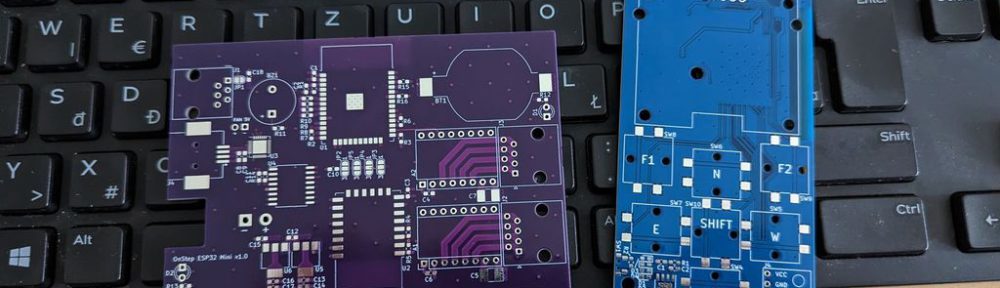
Srdcom riadenia je známy, cenovo dostupný mikrokontrolér ESP32. Ten má v sebe zabudovanú WiFi perifériu, ktorá by sa dala využiť práve pre prepojenie riadenia s PC, smartfónom, ovládačom. Projekt však podporuje aj iné mikrokontroléry, ktoré WiFi perifériu nepodporujú a preto je pre WiFi pripojenie potrebný druhý mikrokontrolér. Možnosti sú dve a to buď rovnaký, ESP32 alebo menší ESP8266. Ja som zvolil menší a ešte lacnejší variant ESP8266. Krokové motory sú riadené budičmi TMC5160 a to ako modul z dielne BigTreeTech. Sú to jedny z najpokročilejších budičov krokových motorov v tejto cenovej a veľkostnej kategórii. Budiče sú tak „presné“, že pri bežnom chode je montáž úplne tichá. Pri GoTo manévroch viac počuť vŕzganie remeňov ako motory. K PC je tiež možné riadenie pripojiť pomocou USB a riadiť montáž pomocou ASCOM alebo INDI protokolu. Samozrejmosťou je ST4 port pre autoguider. Malým bonusom oproti riadeniu montáží ako je napr. HEQ5 je možnosť zálohovania dátumu a času externou gombíkovou batériou a RTC modulom. V prípade výpadku napájania si teda montáž zapamätá aktuálny dátum a čas.
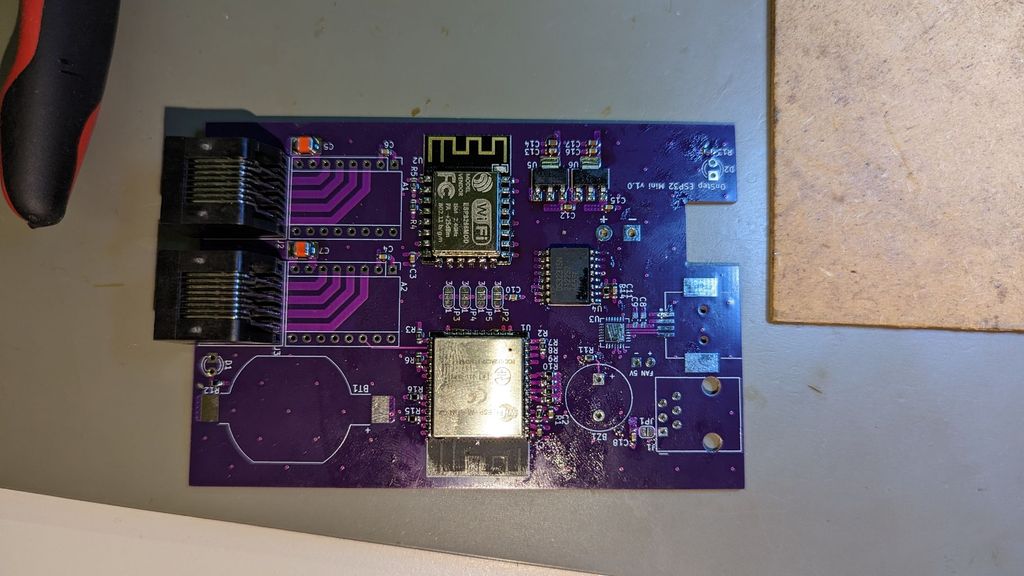
Základom ovládača je taktiež ESP32 a veľký 1.54″ OLED displej. Ovládač je napájaný z jedného Li-ion článku veľkosti 18650. Článok je možné po vybití vymeniť za druhý, alebo nabiť cez MicroUSB konektor, cez ktorý je zároveň možné aktualizovať riadiaci program v ESP32. V pamäti ovládača je uložených množstvo nebeských objektov počnúc Slnkom a Mesiacom cez planéty a jasné hviezdy až k rôznym katalógom DSO ako sú Messier, NGC, IC a ďalšie.


Spojením mechanického počinu z dielne Borisa s riadením OnStep sa z Kadet 30 stala plnohodnotná paralaktická montáž, ktorá môže smelo konkurovať fabrickej HEQ5, ktorej sa najviac podobá hmotnosťou, nosnosťou, rýchlosťou pojazdu a zrejme aj presnosťou chodu.
Zostáva už len jediné, montáž poriadne pokrstiť nejakou peknou snímkou.
Autori: Boris Kardoš a Samo Toman